Skip to main content
Close Search
search
Menu
Solutions
IMU & AHRS
MEMS IMU
Orientus
Motus
FOG IMU
Boreas A70 & A90
Inertial Navigation Systems
MEMS GNSS/INS
Spatial
Certus
Certus Evo
FOG GNSS/INS
Spatial FOG Dual
Boreas D70 & D90
Satellite Compass
GNSS Compass
Robotics
Micro AUV
Hydrus
Drone Fleet Management
Cloud Ground Control
Acoustic Navigation
USBL
Subsonus
Transponders
Subsonus Tag
Accessories
Speed Sensors
OBDII Odometer
Air Data Unit
Subsea Antennas
Poseidon
GNSS/INS Post Processing
Kinematica
Industries
Aerospace
Automotive
Autonomous Farming
Autonomous Systems
Defence
Marine
Space
Subsea
Surveying
Resources
Case Studies
Tech Articles
Events & Webinars
Press Releases
Media Coverage
Press Kit
Glossary
Support
Product Documentation
Support Center & Tickets
Contact
linkedin
youtube
search
News
Filter
News
Hydrus plunges into Rottnest Ships Graveyard, Investigating Maritime Mysteries
2 April 2024
Filter
News
Department of Defence awards Advanced Navigation grant to spearhead Australia’s domestic manufacturing capability for photonic chips
7 December 2023
Advanced Navigation opens high-tech robotics manufacturing facility
26 September 2023
Advanced Navigation awarded $5.2M in funding from Australian Space Agency for Future Lunar Exploration
28 June 2023
Advanced Navigation unveils Australia’s largest subsea robotics centre
18 April 2023
Cloud Ground Control empowers emergency response and disaster relief with 5G drone fleet control
5 April 2023
KKR Leads AUD 108 million Series B Funding Round in AI Leader Advanced Navigation
17 November 2022
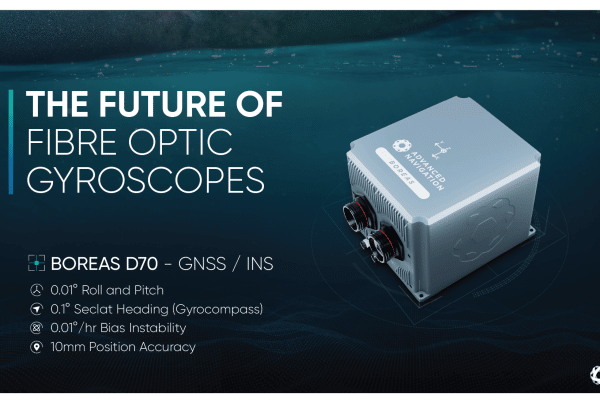
Advanced Navigation announces Boreas D70, new digital fibre-optic gyroscope
18 October 2022
Advanced Navigation Wins Program with BAE Systems in Sweden
10 October 2022
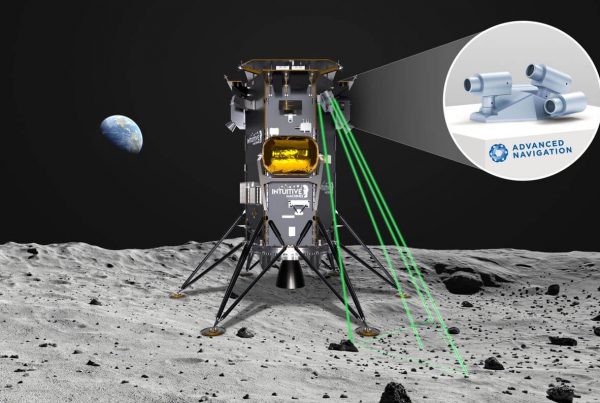
Advanced Navigation set to be the first Australian company to reach the Moon
15 July 2022
Connecting Hydrus (AUV) with the Ocean Community
2 June 2022
Shaping the Future of Photonic Sensing: Advanced Navigation Acquires Vai Photonics
5 May 2022
Advanced Navigation launches subsea drone Hydrus, to open new frontiers in ocean exploration and conservation
5 April 2022
Close Menu
Solutions
IMU & AHRS
MEMS IMU
Orientus
Motus
FOG IMU
Boreas A70 & A90
Inertial Navigation Systems
MEMS GNSS/INS
Spatial
Certus
Certus Evo
FOG GNSS/INS
Spatial FOG Dual
Boreas D70 & D90
Satellite Compass
GNSS Compass
Robotics
Micro AUV
Hydrus
Drone Fleet Management
Cloud Ground Control
Acoustic Navigation
USBL
Subsonus
Transponders
Subsonus Tag
Accessories
Speed Sensors
OBDII Odometer
Air Data Unit
Subsea Antennas
Poseidon
GNSS/INS Post Processing
Kinematica
Industries
Aerospace
Automotive
Autonomous Farming
Autonomous Systems
Defence
Marine
Space
Subsea
Surveying
Resources
Case Studies
Tech Articles
Events & Webinars
Press Releases
Media Coverage
Press Kit
Glossary
Support
Product Documentation
Support Center & Tickets
Contact
About Advanced Navigation
Level 12, 255 George Street
Sydney NSW 2000 Australia
T:
+61 2 9099 3800
linkedin
youtube